|
Note
|
The Grid Community Toolkit documentation was taken from the Globus Toolkit 6.0 documentation. As a result, there may be inaccuracies and outdated information. Please report any problems to the Grid Community Forums as GitHub issues. |
This guide contains information of interest to developers working with XIO. It provides reference information for application developers, including APIs, architecture, procedures for using the APIs and code samples.
Before you begin
Feature summary
Supported Features
-
Driver specific string attributes. Set values like tcp buffer size via string at runtime.
-
UDT driver.
-
Mode E Driver
-
Telnet Driver
-
Queuing Driver
-
Ordering Driver
-
Dynamically loadable drivers.
-
Single API to swappable IO implementations.
-
Asynchronous IO support.
-
Native timeout support.
-
Data descriptors for providing driver specific hints.
-
Modular driver stacks to maximize code reuse.
-
TCP, UDP, file, HTTP, telnet, mode E, GSI drivers.
Deprecated Features
-
GSSAPI_FTP driver now distributed with the GridFTP Server
Tested platforms
Tested Platforms for XIO:
| Operating System | Distribution | Version(s) | Architecture(s) |
|---|---|---|---|
Linux |
CentOS |
5, 6 |
i386, x86_64 |
7 |
x86_64 |
||
Fedora |
20, 21, 22 |
i386, x86_64 |
|
Red Hat Enterprise Linux |
5, 6 |
i386, x86_64 |
|
7 |
x86_64 |
||
Scientific Linux |
5, 6 |
i386, x86_64 |
|
7 |
x86_64 |
||
SUSE Linux Enterprise Server |
11SP3 |
x86_64 |
|
Debian |
6, 7, 8 |
i386, amd64 |
|
Ubuntu |
12.04LTS, 14.04LTS, 14.10, 15.04 |
i386, amd64 |
|
Mac OS X |
10.6-10.10 |
i386, x86_64 |
|
Solaris |
OmniOS |
r151006 |
x86_64 |
Windows 7 |
Cygwin |
i386, x86_64 |
|
MingW64 |
i386, x86_64 |
||
Backward compatibility summary
Protocol changes since GT version 6.0
-
None.
API changes since GT version 6.0
-
None.
Technology dependencies
XIO depends on the following GCT components:
-
Globus Core
-
Globus Common
-
Globus GSSAPI
Security considerations for XIO
Globus XIO is a framework for creating network protocols. Several existing protocols, such as TCP, come built into the framework. XIO itself introduces no known security risks. However, all network applications expose systems to the risks inherent when outsiders can connect to them. Also included in the XIO distribution is the GSI driver, which provides a driver that allows for secure connections.
Using the Globus XIO API for IO operations within C programs
Introduction
This Guide explains how to use the Globus XIO API for IO operations within C programs. Since Globus XIO is a simple API it is pretty straight forward. The best way to become familiar with it is by looking at an example. See globus_xio_example.c.
Activate the Globus XIO Module
Let’s examine the case where a user wishes to use Globus XIO for reading data from a file. As in all globus programs the first thing that must be done is to activate the globus module. Until activated no globus_xio function calls can be successfully executed. It is activated with the following line:
globus_module_activate(GLOBUS_XIO_MODULE);
Load Driver
Let’s examine the case where a user wishes to use Globus XIO for reading data. The next step is to load all the drivers needed to complete the IO operations in which you are interested. The function globus_xio_load_driver() is used to load a driver. In order to successfully call this function you must know the name of all the drivers you wish to load. For this example we only want to load the file IO driver. The prepackaged file IO driver’s name is: "file". This driver would be loaded with the following code:
globus_result_t res;
globus_xio_driver_t driver;
res = globus_xio_driver_load(&driver, "file");
If upon completion of the above function call res returns
GLOBUS_SUCCESS then the driver was successfully loaded and can be
referenced with the variable "driver".
Create Stack
Now that globus_xio is activated and we have a driver loaded we need to build a driver stack. In our example the stack is very simple as it consists of only one driver, the file driver. The stack is established with the following code (building off of the above code snippets):
globus_xio_stack_t stack;
globus_xio_stack_init(&stack);
globus_xio_stack_push_driver(stack, driver);
Opening Handle
Now that the stack is created we can open a handle to the file. There are two ways that a handle can be opened. The first is a passive open. An example of this is a TCP listener. The open is performed passively by waiting for some other entity to act upon it. The second is an active open. An active open is the opposite of a passive open. The TCP counter example for this is a connect. The users initiates the open. In our example we shall be performing an active open.
Before opening a handle it must be initialized. The following illustrates initialization for client side handles:
globus_xio_handle_t handle;
res = globus_xio_handle_create(&handle, stack);
Server side handles are a bit more complicated. First we must introduce
the data structure globus_xio_server_t. This structure shares many
concepts with a TCP listener, mainly that it spawns handles
("connections") as passive open requests are made. If the user wishes to
accept a new connection a call to globus_xio_accept() or
globus_xio_register_accept() will initialize a new handle:
globus_xio_server_t server;
globus_xio_handle_t handle;
globus_result_t res;
res = globus_xio_server_create(&server_handle, NULL, stack);
res = globus_xio_server_accept(&handle, server);
Once the handle is initialized it should be opened in order to perform read and write operations upon it. It the handle is a client then a "contact string" is required. This string represents the target that the user wishes to open:
globus_xio_attr_t attr;
char * contact_string = "file:/etc/groups";
globus_xio_attr_init(&attr);
globus_xio_open(xio_handle, contact_string, attr);
globus_xio_attr_destroy(attr);
note: attrs can be used to color the behaviors of a handle. For a conceptual understanding, they are not important and a user is free to simple pass NULL wherever an attr is required.
Now that we have an open handle to a file we can read or write data to it with either globus_xio_read() or globus_xio_write(). Once we are finished performing IO operations on the handle globus_xio_close(handle) should be called.
Pay Off
This may seem like quite a bit of effort for simple reading a file, and it is. However the advantages become clear when exploring the swapping of other drivers. In the above example it would be trivial to change the IO operations from file IO to TCP, or HTTP, or ftp. All the the user would need to do is change the driver name string passed to globus_xio_load_driver() and the contact string passed to globus_xio_target_init(). This can easily be done at runtime, as the program globus_xio_example.c demonstrates.
So the little program globus_xio_example.c has the ability to be any reading client or server (HTTP, ftp, TCP, file, etc) as long as the proper drivers are in the LD_LIBRARY_PATH.
Driver Quick Start
Introduction
This Guide explains how to create a transport driver for Globus XIO. For the purpose of exploring both what a transform driver is and how to write one this guide will walk through an example driver. The full source code for the driver can be found at Driver Example. This example implements a file driver for globus_xio. If a user of globus_xio were to put this file at the bottom of the stack, they could access files on the local file system.
Data Structures
There are three data structures that will be explored in this example: attribute, target, and handle. The driver defines the memory layout of these data structures but the globus_xio framework imposes certain semantics upon them. It is up to the driver how to use them, but globus_xio will be expecting certain behaviors.
Attributes
Each driver may have its own attribute structure. The attribute gives the globus_xio user API an opportunity to tweak parameters inside the driver. The single attribute structure is used for all possible driver specific attributes:
-
Target attributes
-
Handle attributes
-
Server attributes
How each of these can use the attribute structure will be unveiled as the tutorial continues. For now it is simply important to remember there is attribute structure used to initiate of the driver ADTs.
A driver is not required to have an attribute support at all. However if the driver author chooses to support attributes the following functions must be implemented:
typedef globus_result_t
(*globus_xio_driver_attr_init_t)(
void ** out_attr);
typedef globus_result_t
(*globus_xio_driver_attr_cntl_t)(
void * attr,
int cmd,
va_list ap);
typedef globus_result_t
(*globus_xio_driver_attr_copy_t)(
void ** dst,
void * src);
typedef globus_result_t
(*globus_xio_driver_attr_destroy_t)(
void * attr);
See driver API doc for more information.
We shall now take our first look at the file
Driver Example. The file driver
needs a way to provide the user level programmer with a means of setting
the mode and flags when a file is open (akin to the POSIX function
open()).
The first step in creating this ability is to a) define the attribute
structure and b) implement the globus_xio_driver_attr_init_t
function which will initialize it:
/*
* attribute structure
*/
struct globus_l_xio_file_attr_s
{
int mode;
int flags;
}
globus_result_t
globus_xio_driver_file_attr_init(
void ** out_attr)
{
struct globus_l_xio_file_attr_s * file_attr;
/*
* create a file attr structure and initialize its values
*/
file_attr = malloc(sizeof(struct globus_l_xio_file_attr_s));
file_attr->flags = O_CREAT;
file_attr->mode = S_IRWXU;
/* set the out parameter to the driver attr */
*out_attr = file_attr;
return GLOBUS_SUCCESS;
}
The above simply defines a structure that can hold two integers, mode
and flags, then defines a function the will allocate and initialize this
structure. globus_xio hides much of the memory management of these
attribute structures from the driver. However, it does need the driver
to provide a means of copying them, and free all resources associated
with them. In the case of the file driver example, these are both
simple:
globus_result_t
globus_xio_driver_file_attr_copy(
void ** dst,
void * src)
{
struct globus_l_xio_file_attr_s *file_attr;
file_attr = malloc(sizeof(struct globus_l_xio_file_attr_s));
memcpy(file_attr, src, sizeof(struct globus_l_xio_file_attr_s));
*dst = file_attr;
return GLOBUS_SUCCESS;
}
globus_result_t
globus_xio_driver_file_attr_destroy(
void * attr)
{
free(attr);
return GLOBUS_SUCCESS;
}
The above code should be fairly clear. Obviously we need a method with which the user can set flags and mode. This is accomplished with the following interface function:
globus_result_t
globus_xio_driver_file_attr_cntl(
void * attr,
int cmd,
va_list ap)
{
struct globus_l_xio_file_attr_s *file_attr;
int * out_i;
file_attr = attr;
switch(cmd)
{
case GLOBUS_XIO_FILE_SET_MODE:
file_attr->mode = va_arg(ap, int);
break;
case GLOBUS_XIO_FILE_GET_MODE:
out_i = va_arg(ap, int *);
*out_i = file_attr->mode;
break;
case GLOBUS_XIO_FILE_SET_FLAGS:
file_attr->flags = va_arg(ap, int);
break;
case GLOBUS_XIO_FILE_GET_FLAGS:
out_i = va_arg(ap, int *);
*out_i = file_attr->flags;
break;
default:
return FILE_DRIVER_ERROR_COMMAND_NOT_FOUND;
break;
}
return GLOBUS_SUCCESS;
}
This function is called passing the driver an initialized file_attr
structure, a command, and a variable argument list.
Based on the value of cmd, the driver decides to do one of the
following:
-
set flags or mode from the
va_args -
return flags or mode to the user via a pointer in
va_args
Target
A target structure represents what a driver will open. It is initialized from a contact string and an attribute. In the case of a file driver, the target simply holds onto the contact string as a path to the file.
The file driver implements the following target functions:
globus_result_t
globus_xio_driver_file_target_init(
void ** out_target,
void * target_attr,
const char * contact_string,
globus_xio_driver_stack_t stack)
{
struct globus_l_xio_file_target_s *target;
/* create the target structure and copy the contact string into it */
target = malloc(sizeof(struct globus_l_xio_file_target_s));
strncpy(target->pathname, contact_string, sizeof(target->pathname) - 1);
target->pathname[sizeof(target->pathname) - 1] = '\0';
return GLOBUS_SUCCESS;
}
/*
* destroy the target structure
*/
globus_result_t
globus_xio_driver_file_target_destroy(
void * target)
{
free(target);
return GLOBUS_SUCCESS;
}
The above function handles the creation and destruction of the file driver’s target structure.
|
Note
|
When the target is created, the contact string is copied into it. It is invalid to just copy the pointer to the contact string. As soon as this interface function returns, that pointer is no longer valid. |
Handle
The most interesting of the three data types discussed here is the handle. All typical IO operations (open, close, read, write) are performed on the handle. The handle is the initialized form of the target and an attr. The driver developer should use this ADT to keep track of any state information they will need in order to perform reads and writes.
In the example case, the driver handle is fairly simple as the driver is merely a wrapper around POSIX calls:
struct globus_l_xio_file_handle_s
{
int fd;
};
The reader should review the following functions in Driver Example in order to see how the handle structure is used:
-
globus_xio_driver_file_open() -
globus_xio_driver_file_write() -
globus_xio_driver_file_read() -
globus_xio_driver_file_close()
IO Operations
The read and write interface functions are called in response to a user
read or write request. Both functions are provided with a vector that
has at least the same members as the struct iovec and a vector
length. As of now, the iovec elements may contain extra members, so if
you wish to use readv() or writev(), you will have to transfer
the iov_base and iov_len members to the POSIX iovec.
As with the open and close interface functions, if an error occurs
before any real processing has occurred, the interface function may
simply return the error (in a result_t), effectively canceling the
operation. However, once bytes have been read or written, you must not
return the error. You must report the number of bytes read/written along
with the result.
When an operation is done, either by error or successful completion, the operation must be finished. To do this, a call must be made to:
globus_result_t
globus_xio_driver_finished_read/write(
globus_xio_driver_operation_t op,
globus_result_t res,
globus_ssize_t nbytes);
Blocking vs Non-blocking Calls
In general, the driver developer does not need to concern himself with how the user made the call. Whether it was a blocking or an asynchronous call, XIO will handle things correctly.
However the call was made, the driver developer can call globus_xio_driver_finished_{open, read, write, close} either while in the original interface call, in a separate thread, or in a separate callback kick out via the globus_callback API.
The Glue
Through a process not finalized yet, XIO will request the
globus_xio_driver_t structure from the driver. This structure
defines all of the interface functions that the driver supports. In
detail:
/* * main io interface functions */ globus_xio_driver_open_t open_func; globus_xio_driver_close_t close_func; globus_xio_driver_read_t read_func; globus_xio_driver_write_t write_func; globus_xio_driver_handle_cntl_t handle_cntl_func; globus_xio_driver_target_init_t target_init_func; globus_xio_driver_target_destroy_t target_destroy_finc; /* * target init functions. Must have client or server */ globus_xio_driver_server_init_t server_init_func; globus_xio_driver_server_accept_t server_accept_func; globus_xio_driver_server_destroy_t server_destroy_func; globus_xio_driver_server_cntl_t server_cntl_func; /* * driver attr functions. All or none may be NULL */ globus_xio_driver_attr_init_t attr_init_func; globus_xio_driver_attr_copy_t attr_copy_func; globus_xio_driver_attr_cntl_t attr_cntl_func; globus_xio_driver_attr_destroy_t attr_destroy_func; /* * data descriptor functions. All or none */ globus_xio_driver_data_descriptor_init_t dd_init; globus_xio_driver_driver_data_descriptor_copy_t dd_copy; globus_xio_driver_driver_data_descriptor_destroy_t dd_destroy; globus_xio_driver_driver_data_descriptor_cntl_t dd_cntl;
Tutorials
Architecture and design overview
Introduction
This document shall explain the external view of the Globus XIO architecture. Globus XIO is broken down into two main components, framework and drivers. The following picture illustrates the architecture:
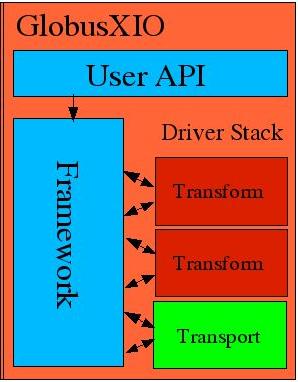
Framework
The Globus XIO framework manages IO operation requests that an application makes via the user API. The framework does no work to deliver the data in an IO operation nor does it manipulate the data. All of that work is done by the drivers. The framework’s job is to manage requests and map them to the drivers interface. It is the drivers themselves that are responsible for manipulating and transporting the data.
Drivers
A driver is the component of Globus XIO that is responsible for manipulating and transporting the users data. There are two types of drivers, transform and transport. Transform drivers are those that manipulate the data buffers passed to it via the user API and the XIO framework. Transport drivers are those that are capable of sending the data over a wire.
Drivers are grouped into stacks, that is, one driver on top of another. When an IO operation is requested the Globus XIO framework passes the operation request to every driver in the order they are in the stack. When the bottom level driver (the transport driver) finishes shipping the data, it passes the data request back to the XIO framework. Globus XIO will then deliver the request back up the stack in this manner until it reaches the top, at which point the application will be notified that there request is completed.
In a driver stack there can only be one transport driver. The reason for this is that the transport driver is the one responsible for sending or receiving the data. Once this type of operation is performed it makes no sense to pass the request down the stack, as the data has just been transfered. It is now time to pass the operation back up the stack.
There can be many transform drivers in any given driver stack. A transform driver is one that can manipulate the requested operations as they pass. Some good examples of transform drivers are security wrappers and compression. However, a transport driver can also be one that adds additional protocol. For example a stack could consist of a TCP transport driver and an HTTP transform driver. The HTTP driver would be responsible for marshaling the HTTP protocol and the TCP driver would be responsible for shipping that protocol over the wire.
Example
In the following picture we illustrate a user application using Globus XIO to speak the GridFTP protocol across a TCP connection:
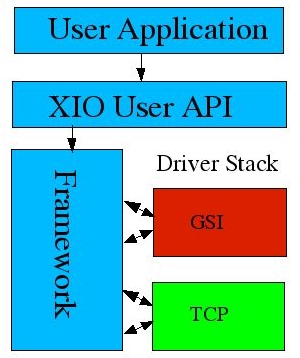
The user has built a stack consisting of one transform driver and one transport driver. TCP is the transport driver in this stack, and as all transport modules must be, it is at the bottom of the stack. Above TCP is the GSI transform driver which performs necessary messaging to authenticate a user and the integrity of the data.
The first thing the user application will do after building the stack is call the XIO user API function globus_xio_open(). The Globus XIO framework will create internal data structures for tracking this operation and then pass the operation request to the GSI driver. The GSI driver has nothing to do before the underlying stack has opened a handle so it simply passes the request down the stack. The request is thereby passed to the TCP driver. The TCP driver will then execute the socket level transport code contained within it to establish a connection to the given contact string.
Once the TCP connection has been established the TCP driver will notify the XIO framework that it has completed its request and thereby the GSI driver will be notified that the open operation it had previously passed down the stack has now completed. At this point the GSI driver will start the authentication processes (note that at this point the user does not yet have an open handle). The GSI driver has an open handle and upon it several sends and receives are performed to authenticate the connection. If the GSI driver is not satisfied with the authentication process it closes the handle it has to the stack below it and tells the XIO framework that it has completed the open request with an error. If it is satisfied it simply tells the XIO framework that it has completed the open operation. The user is now notified that the open operation completed, and if it was successful they now have an open handle.
Other operations work in much the same way. When a user posts a read the read request is first delivered to the GSI driver. The GSI driver will wrap the buffer and pass the modified buffer down the stack. The framework will then deliver the write request with the newly modified buffer to the TCP driver. The TCP driver will write the data across the socket mapped to this handle. When it finishes it notifies the framework, which notifies the GSI driver. The GSI driver has nothing more to do so it notifies the framework that it is complete and the framework then notifies the user.
Driver Interface
There is a well defined interface to a driver. Drivers are modular components with specific tasks. The purpose of drivers in the Globus XIO library is extensibility. As more and more protocols are developed, more and more drivers can be written to implement these protocols. As new drivers are written they can be added to Globus XIO as either statically linked libraries or dynamically loaded libraries. In the case of dynamic loading it is not even necessary to recompile existing source code. Each driver has a unique name according to the Globus XIO driver naming convention. A program simply needs to be aware of this name (this can be passed in via the command line) and the Globus XIO framework will be responsible for loading the driver.
|
Note
|
The above example is simplified for the purposes of understanding. There are optimizations built into Globus XIO which alter the course of events outlined above. However, conceptually the above is accurate. |
XIO APIs
Programming Model Overview
Globus XIO is based on an event based asynchronous programming model. This model is described in great detail at: Asynchronous Event Handling. In short, with Globus XIO, connections are opened and closed. While open, read and write requests are posted with a callback function pointer given by the user. When the event completes, the given callback is called.
Component API
You can find documentation of the XIO library at:
For information on the internationalization API, see C Common Library APIs.
Environment Variable Interface
Environmental variables for XIO
The vast majority of the environment variables that affect the Globus XIO framework are defined by the driver in use. The following are links to descriptions of the more common driver environment variables:
Debugging
All standard C debugging techniques apply to debugging XIO applications. Also, Globus XIO provides users with some additional debugging information. If the environment variable GLOBUS_XIO_DEBUG is set debugging information will be written to a file or stdout. The information generated is particularly useful to identify a suspect bug in Globus XIO. GLOBUS_XIO_DEBUG is set in the following way:
GLOBUS_XIO_DEBUG="<level> [,[[#]<file name>][,<flag>[,<timestamp_levels>]]"
The value of <level> can take on the logical OR of any of the
following:
-
GLOBUS_XIO_DEBUG_ERROR = 1
-
GLOBUS_XIO_DEBUG_WARNING = 2
-
GLOBUS_XIO_DEBUG_TRACE = 4
-
GLOBUS_XIO_DEBUG_INTERNAL_TRACE = 8
-
GLOBUS_XIO_DEBUG_INFO = 16
-
GLOBUS_XIO_DEBUG_STATE = 32
-
GLOBUS_XIO_DEBUG_INFO_VERBOSE = 64
<file name> is a debug output file, if empty stderr will be used by
default. If a # precedes the filename, the file will be overwritten on
each run. Otherwise, the output will be appended to the existing file.
<flags>
-
0 = default
-
1 = show thread ids
-
2 = append the pid to debug filename
Troubleshooting
Set GLOBUS_LOCATION correctly
-
The environment variable
GLOBUS_LOCATIONmust be set to a valid GCT 6.2 installation. -
Various other environment variables must be set in order to easily use the GlobusXIO application. The proper environment can be established by running:
source $GLOBUS_LOCATION/etc/globus-user-env.shorsource $GLOBUS_LOCATION/etc/globus-user-env.cshdepending on the shell you are using.
Errors
| Error Code | Definition | Possible Solutions |
|---|---|---|
|
An I/O operation has been canceled by a close or a cancel |
In most cases this will be intentionally performed by the application developer. In unexpected cases the applciation developer should verify that there is not a race condition relating to closing a handle. |
|
Occurs when the application developer associates a timeout with a handle’s I/O operations. If no I/O is performed before the timeout expires this error will be triggered. |
The remote side of connection might be hung and busy. The network could have higher latencies than expected. The filesystem might be over worked. |
|
This occurs when and EOF is detected on the file descriptor |
When doing file I/O this like means you read to the end of the file and thus you are finished and should now close it. On network connections however it means the socket was closed on the remote end. This can happen it the remote side suddenly dies (seg-fault is common here) or if the remote side chooses to close the connection. |
|
A poorly formed contact string was passed in to open |
Verify the format of the contact string with the documentation of the drivers in use. |
|
malloc failed. The system is likely quite overloaded |
Free up memory in your application |
|
A low level system error occurred. The errno and errstring should indicate more information. |
|
|
The requested stack does not meet XIO standards |
Most likely a transport driver is not on the bottom of the stack, or 2 transport drivers are in the stack. |
|
With certain common drivers like TCP and FILE, only one specific operations can be registered at a time (1 read, 1 write). If another operation of the same type is posted to the handle before receiving the previous operations callback, this error can occur. |
Restructure the application code so that it waits for the callback before registering the next IO operation. |
|
The internal logic of XIO came across a logical path that should not be possible. Often times this is due to application memory corruption or trying to perform an IO operation on a closed or otherwise invalid handle. |
Use valgrind or some sort of memory managment tool to verify there is no memory corruption. Try to recreate the problem in a small program. Submit the program and the memory trace to the Globus bug tracker. |
|
A driver associated with the offending operation has already been unloaded by the application code. |
Verify that you are not unloading drivers until they are no longer in use. |
|
globus_module_activate(GLOBUS_XIO_MODULE); has not been called. |
Call this before making any other XIO API calls. |
Related Documentation
Appendix A: Add on
Introduction
Here we describe a GPT bundle of some useful GlobusXIO drivers. The drivers are not packaged with the standard globus release because they require external dependencies, or are otherwise best distributed in a separate release. Here you can get each driver individually, or a bundle of all the drivers.
UDT Reference Implementation Driver
This driver uses the reference implementation of UDT provided at LINK and the Globus XIO wrapblock feature to create a Globus XIO UDT driver.
Bandwidth Limiting Driver
This is a bandwidth limiting driver. It allows the user to specify a bandwidth cap for a given connection.
Features
*
String Options
-
rate=
-
read_rate=
-
write_rate=
-
period=
-
read_period=
-
write_period=
Pipe Open Driver
This driver will run an executable program with pipes connecting STDIN and STDOUT of the program to this Globus XIO driver. In this way buffers are routed from Globus XIO to the executable. This driver is most notably used with ssh for running remote programs over a secure link.
String Options
-
blocking=
-
pass_env=
-
argv=
Bidirectional Driver
The BIDI driver, bi-directional driver allows a user to turn a unidirectional pipe, into a bidirectional stream. It does this simply by opening up 1 uni-directional pipe in each direction. By default it assumes the use of the ModeE driver, but it can be configured to use any driver.
Important attribute controls are listed here.
-
GLOBUS_XIO_BIDI_SET_READ_STACK
-
GLOBUS_XIO_BIDI_SET_WRITE_STACK
-
GLOBUS_XIO_BIDI_SET_READ_ATTR
-
GLOBUS_XIO_BIDI_SET_WRITE_ATTR
Netlogger Driver
This driver observes IO events on a driver stack and uses netlogger to log these events.
String Options
-
filename=
-
mask=
-
type=
-
id=
Skeleton Driver
This is a very simple driver to serve as an example and base for writing additional drivers. It does nothing but pass operations along the stack