|
Note
|
The Grid Community Toolkit documentation was taken from the Globus Toolkit 6.0 documentation. As a result, there may be inaccuracies and outdated information. Please report any problems to the Grid Community Forums as GitHub issues. |
GCT → Appendices → Grid Community Toolkit 6.0 Developer’s Guide
Please note that the Best Practices need to be updated for GCT 6 and are not being published at this time.
You can download the PDF version here. Following are some docs you should be familiar with as well:
-
All GCT command line clients are listed here.
Asynchronous Event Handling with Examples
GCT 6.0: Asynchronous Event Handling
The Grid Community Toolkit contains several APIs written in C for creating grid applications. Each of these components is built on a coherent asynchronous event model. This text will introduce and explain the philosophy behind the model and its basic concepts.
Examples
Event Models
The Grid Community Toolkit uses an asynchronous event model. Details of this model are contained in the remainder of this text but it will be helpful to take a few examples of other popular models.
Applications existing in event heavy environments, such as graphical user interfaces (GUIs), IO, or inter-process signaling, must implement some event model. Events are characterized by changes in the environment at an undetermined time. There are several different popular models used to handle such events. We provide examples of them here, and then describe in detail the asynchronous event model used by the Grid Community Toolkit.
Blocking Event Model
In a blocking API, an event is serviced, delaying all processing in the current thread of execution until the event completes. This has the obvious disadvantage that no processing can be done while waiting on the IO. Typically this is solved by forking additional processes or creating additional threads to service each event. However, more processes and more threads make a more resource intensive application.
Example: Blocking Event Model
main()
{
while(!done)
{
~ other processing ~
data = ReadData();
~ process event ~
}
}
Non-blocking Event Model
A non-blocking model follows the same in-line procedural model as blocking except that events are polled for completion. Instead of blocking all processing until the event completes, the user asks if the event is complete. If so, the event is processed. If not, other processing may resume.
Example: Non-blocking Event Model
main()
{
while(!done)
{
if(EventIsReady())
{
~ process event ~
}
else
{
~ other processing ~
}
}
}
Unlike the blocking model, this approach allows for simultaneous processing while waiting for the event. However, it can become cumbersome as more and more events are added. Further, if there is no other processing to be done, it results in tight spin loops that use the CPU simply to poll for events.
Asynchronous Event Model
The asynchronous approach does not follow the in-line procedure. Instead events are given handler functions. A user registers for an event with the system, giving it a handler function. When the event occurs the system calls the user’s handler function.
Example: Asynchronous Event Model
event_handler()
{
process event
register_next_event();
}
main()
{
~ other processing ~
register_event()
~ other processing ~
while(!done)
{
wait_for_events();
}
}
Like the non-blocking model, this allows simultaneous event and data processing. In this model, programs are designed as a series of events rather than a serial execution of instructions. A programmer registers events and when they occur the necessary processing is done. Additional events may then be registered and the program goes back to waiting for events. This is the approach taken by the Grid Community Toolkit.
Callback Library
The heart of the GCT event model is the callback library. This API provides a user with functionality for asynchronous time events. In order to use the API for events, the user must implement a function (the callback) that is called when the event has occurred and processes it.
There are two fundamental functions that explain the API:
globus_result_t
globus_callback_register_oneshot(
globus_callback_handle_t * callback_handle,
const globus_reltime_t * delay_time,
globus_callback_func_t callback_func,
void * callback_user_args);
globus_result_t
globus_poll();
The first function is fairly clear. It registers the callback
callback_func with the system that will be called once the time
specified by delay_time has expired.
The more interesting of the two is globus_poll(). Semantically this
function is used to briefly turn control over to the GCT event system
for processing. What this means is that globus_poll() must be called
often enough for the GCT event system to function. This is recognized
as a rather ambiguous statement. Therefore, a look at what happens with
globus_poll() should assist in explanation. In threaded builds of
GCT this globus_poll() simply results in a call to
thread_yield() where control can be switched to a background thread
dedicated to event processing. In non-threaded builds, a list of events
is maintained by the system. A call to globus_poll() finds ready
events in the list and dispatches the associated callback to the user
within the same call stack.
In Example 1 a use of these two functions
is displayed. The function user_callback is registered for execution
after 1 second has elapsed.
In a non-threaded build, there is a single thread of execution. In the
main loop, the call to globus_poll() invokes the GCT event
process code. The code checks internal data structures for any ready
events. If found, the user callbacks associated with the events will be
called in the same call stack.
In a threaded build a user would see two threads (possibly more, but for
the sake of clarity two will be used): the main thread that is executing
the loop in main() and an internal GCT thread that is handling
polling of events. The GCT thread is created when the user calls
globus_module_activate(GLOBUS_COMMON_MODULE). This function must be
called before any API function in the the globus_common package can
be used. This is another common theme in GCT: all modules must be
activated before use and deactivated when finished. The event thread
polls all events and as they become ready the functions associated with
them are dispatched.
Another important concept to note in this API is the use of the void *
user_arg parameter. This is a simple but important part of the model.
On registration of an event, a user can pass in a void pointer and this
pointer will be threaded through to their event callback. The pointer
can point to any bit of memory the user likes. Typically it points to
some structure that allows the user to maintain state throughout a
series of event callbacks. This memory is completely managed by the
user, so if the memory is used in the event callback the user needs to
be careful to not free the memory until the callback occurs. For a
more complicated example of this see Example
2.
Thread Abstraction
The first thing to look at in understanding the GCT event model is the thread abstraction layer. GCT can be built in a variety of ways with regard to the underlying thread system. It can be built with pthreads, win32 threads, or non threaded depending on the user’s preferences and the available packages on the system. All builds present the same API. This thread API is very much akin to pthreads. If the reader is not familiar with pthreads, we recommend reading the pthread manual. The more notable API interface is presented below:
int
globus_thread_create(
globus_thread_t * thread,
globus_threadattr_t * attr,
globus_thread_func_t func,
void * user_arg);
int
globus_mutex_lock(
globus_mutex_t * mutex);
int
globus_mutex_unlock(
globus_mutex_t * mutex);
int
globus_cond_wait(
globus_cond_t * cond,
globus_mutex_t * mutex);
int
globus_cond_signal(
globus_cond_t * cond);
It is important to note that this is not a complete set of necessary functions to properly use the threaded API. However, for the purposes of this text, they will serve for an explanation.
-
globus_thread_create()will start a new thread of execution with a new call stack running beginning at the parameterfunc. -
globus_mutex_lock()andglobus_mutex_unlock()provide mutual exclusive among threads over critical sections of code. -
globus_cond_wait()andglobus_cond_signal()provide a means of thread synchronization. -
wait()will delay the thread that calls it until some other thread callssignal().
In most cases the thread layer abstraction is a very thin pass through to the underlying thread package.
The notable exception is the non-threaded build. The Grid Community Toolkit has
created a non-threaded, semantically equivalent implementation of all
the functions described above (and of most in the pthreads API) with the
exception of globus_thread_create(). In the non-threaded case this
is a no-op. However the model of asynchronous programming used in the
Grid Community Toolkit, globus_thread_create() is rarely needed or used.
In the GCT model, the callback code and the thread abstraction are coupled. Example 2 shows how this coupling works:
-
An event is registered in the main thread, then
globus_cond_wait()is called. -
When the event has been processed, the handler is called.
-
The handler signals the wait that it may continue, then exits.
-
The signal awakens the wait so the main thread may continue.
-
The main thread then exits.
In the threaded build, globus_cond_wait() and
globus_cond_signal() are simple passes through to the underlying
thread packages, and as described previously, a background thread
delivers the event.
In the non-threaded build, globus_cond_wait() will call
globus_poll() and the non-threaded polling code takes over. For this
reason, it is often not necessary to call globus_poll() in
non-threaded builds. globus_cond_wait() tends to be used often
enough to satisfy the needs of the event system.
Asynchronous Model
In many ways, the asynchronous programming model is the most difficult of the three presented. The blocking model is clearly the easiest, because everything happens in-line, and when the event function (like a read or a write) returns, the event has completed and all data is available. Events in this model are treated just like any other function call and are therefore easily dealt with by programmers with modest logic skills.
The non-blocking model is a bit more complicated than blocking, but not
much. The only twist is that a user must check to see if the event
completed and, if so, how much of it completed. This still allows for
in-line processing; it only requires an additional if statement.
Even when event polling is multiplexed (for example, posix select) the
processing is still inline. The user must add some branches to determine
what event is ready and then process it. The most difficult challenge of
the non-blocking model is making use of the idle time when no events are
ready.
In both non-blocking and blocking, the user has easy, in-line control over when an event is processed. If there is any logic that must occur before the event, the user simply needs to complete that processing before calling either the blocking function or the non-blocking function which checks for ready events. The asynchronous model removes this luxury. In the asynchronous model events can occur at any time. This can complicate the logic of keeping critical sections of code safe. Further complication is caused by the fact that they come in via their own handlers. This removes the luxury of maintaining state on the local stack. Instead all state must be packed into heap allocated structures which are passed to the callbacks via void * pointers (see the monitor structure in Example 2).
The upside to the asynchronous model is that it forces cleaner, more well thought out code. The non-blocking model does not scale well. As more events are managed, the event processing code becomes unmanageable, typically resulting in a single function that is far too long and far too interdependent for practical maintenance. Since users can use local variables, the tendency is to use many different flags to control state instead of a clean, well thought out state machine. This is especially true with software that evolves over time, growing in complexity.
In contrast the asynchronous model scales very well. Every event has a clean separation of being scoped to a user handler function. All shared states among events must be encapsulated into a data structure. A side effect of these two characteristics is that it is easier for a user to define and follow a state machine then it is to create spaghetti logic based on many flags.
Example 3 shows a proper use of the asynchronous model. This example simulates the game of Craps. Craps is a dice game, the rules of which can be found with a simple web search, but the following state diagram should explain the rules well enough for this example.
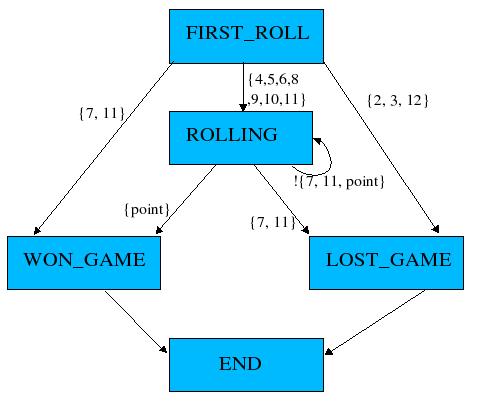
Example 3 follows this state diagram. In
the example rolls of the dice are considered events. For the sake of
simplicity the example only uses a one shot event and then gets the data
by calling random(); If this were a real world event, the values for
the dice would come in as part of the event function. Notice how each
time the event occurs the state is checked and, if needed, advanced to
the next state. In the main function the program waits until the state
machine comes to the final stage, where it signals the wait and allows
for the program to end.
Blocking in Callbacks
What happens if an event handler blocks? The correct answer to this question is: They never should. This answer is of course a bit naive. There will be times when blocking in a callback is the only solution, and there will be even more times when it is the chosen solution, albeit the wrong one. Therefore, the Grid Community Toolkit does have mechanisms to allow this. That said, a user should make every effort to find alternative solutions to blocking in event callbacks. If the only solution is to block in a callback it could be an indication that the state machine is erroneous.
If an event callback is going to block, it must call the following
function: void globus_thread_blocking_will_block(); If
globus_cond_wait() is called, this function is implied.
In the threaded build of GCT there is a background thread that
handles the polling of events and dispatching of the handler functions.
When a handler function blocks, it prevents this process.
globus_thread_blocking_will_block() starts a new thread to handle
event processing and allows the user to take over the current thread
without stopping the processing of other threads. The user must also
call globus_poll() in order to ensure that event processing
continues.
This is needed:
-
in the threaded case to yield the user’s processing thread to the system event thread.
-
in the non threaded case so that the only thread can make a non-blocking run through of any ready events.
Conclusion
The Grid Community Toolkit is middleware for the grid. Because grid infrastructure often depends heavily on both push and pull notifications (remote events), the callback style event handling model the Grid Community Toolkit provides is essential. It allows entire APIs within the toolkit to be designed with asynchronous functions that use the event handling model. Once an API provides that asynchronous functionality (such as XIO), software that builds on top of it can leverage this functionality. This eases the burden of the application programmer, as they need only to implement a callback function to handle possibly many notification events efficiently, instead of stopping execution until one is received, or managing multiple threads.
In the Grid Community Toolkit, because of the thread abstraction it provides, threads are managed by the underlying code base, so that the developer can be ignorant of using threads but still be able to get their benefits, simply by specifying a compile time switch. Overall, this flexibility is quite powerful, which is why we encourage the use of this model when designing and developing your own software components using the Grid Community Toolkit.
GCT 6.0: Asynchronous Event Handling: Example 1
#include <globus_common.h>
void
user_callback(
void * user_arg)
{
int * count;
count = (int *) user_arg;
fprintf(stdout, "User callback, count = %d\n", *count);
exit(0);
}
int
main(
int argc,
char ** argv)
{
globus_reltime_t delay;
int count = 0;
globus_module_activate(GLOBUS_COMMON_MODULE);
GlobusTimeReltimeSet(delay, 1, 0);
globus_callback_register_oneshot(
NULL,
&delay,
user_callback,
&count);
while(1)
{
usleep(10000);
globus_poll_nonblocking();
fprintf(stdout, "After poll\n");
count++;
}
globus_module_deactivate(GLOBUS_COMMON_MODULE);
return 0;
}
GCT 6.0: Asynchronous Event Handling: Example 2
#include <globus_common.h>
struct test_monitor_s
{
globus_mutex_t mutex;
globus_cond_t cond;
globus_bool_t done;
};
void
user_callback(
void * user_arg)
{
struct test_monitor_s * monitor;
monitor = (struct test_monitor_s *) user_arg;
globus_mutex_lock(&monitor->mutex);
{
fprintf(stdout, "Signaling the wait\n");
monitor->done = GLOBUS_TRUE;
globus_cond_signal(&monitor.cond);
}
globus_mutex_unlock(&monitor->mutex);
}
int
main(
int argc,
char ** argv)
{
struct test_monitor_s monitor;
globus_reltime_t delay;
globus_module_activate(GLOBUS_COMMON_MODULE);
globus_mutex_init(&monitor.mutex, NULL);
globus_cond_init(&monitor.cond, NULL);
monitor.done = GLOBUS_FALSE;
globus_mutex_lock(&monitor.mutex);
{
GlobusTimeReltimeSet(delay, 1, 0);
globus_callback_register_oneshot(
NULL,
&delay,
user_callback,
&monitor);
while(!monitor.done)
{
fprintf(stdout, "waiting...\n");
globus_cond_wait(&monitor.cond, &monitor.mutex);
}
}
globus_mutex_unlock(&monitor.mutex);
globus_module_deactivate(GLOBUS_COMMON_MODULE);
fprintf(stdout, "Done\n");
return 0;
}
GCT 6.0: Asynchronous Event Handling: Example 3
#include <globus_common.h>
#include <stdlib.h>
typedef enum game_state_e
{
FIRST_ROLL,
ROLLING,
LOST_GAME,
WON_GAME
} game_state_t;
typedef struct game_context_s
{
globus_mutex_t mutex;
globus_cond_t cond;
game_state_t state;
int rolls;
int point;
} game_context_t;
void
event_callback(
void * user_arg)
{
int die1;
int die2;
game_context_t * game_context;
game_context = (game_context_t *) user_arg;
die1 = rand() % 6 + 1;
die2 = rand() % 6 + 1;
globus_mutex_lock(&game_context->mutex);
{
game_context->rolls++;
fprintf(stdout, "you rolled %d and %d, total is %d\n",
die1, die2, die1+die2);
switch(game_context->state)
{
case FIRST_ROLL:
if(die1+die2 == 7 || die1+die2 == 11)
{
game_context->state = WON_GAME;
globus_cond_signal(&game_context->cond);
}
else if(die1+die2 == 2 || die1+die2 == 3 || die1+die2 == 12)
{
game_context->state = LOST_GAME;
globus_cond_signal(&game_context->cond);
}
else
{
game_context->state = ROLLING;
game_context->point = die1+die2;
fprintf(stdout, "The point is: %d\n", game_context->point);
globus_callback_register_oneshot(
NULL,
NULL,
event_callback,
game_context);
}
break;
case ROLLING:
if(die1+die2 == 7)
{
game_context->state = LOST_GAME;
globus_cond_signal(&game_context->cond);
}
else if(die1+die2 == game_context->point)
{
game_context->state = WON_GAME;
globus_cond_signal(&game_context->cond);
}
else
{
globus_callback_register_oneshot(
NULL,
NULL,
event_callback,
game_context);
}
break;
default:
globus_assert(0 && "should never reach this state");
break;
}
}
globus_mutex_unlock(&game_context->mutex);
}
int
main(
int argc,
char ** argv)
{
game_context_t game_context;
globus_module_activate(GLOBUS_COMMON_MODULE);
globus_mutex_init(&game_context.mutex, NULL);
globus_cond_init(&game_context.cond, NULL);
game_context.rolls = 0;
game_context.state = FIRST_ROLL;
srandom(time(NULL));
globus_mutex_lock(&game_context.mutex);
{
globus_callback_register_oneshot(
NULL,
NULL,
event_callback,
&game_context);
while(game_context.state != LOST_GAME &&
game_context.state != WON_GAME)
{
globus_cond_wait(&game_context.cond, &game_context.mutex);
}
}
globus_mutex_unlock(&game_context.mutex);
fprintf(stdout, "%s, game over in %d rolls.\n",
game_context.state == LOST_GAME ? "You LOSE" : "You WIN",
game_context.rolls);
globus_module_deactivate(GLOBUS_COMMON_MODULE);
return 0;
}
Appendix A: Grid Community Toolkit 6.0 Public Interface Guides
|
Note
|
The Grid Community Toolkit documentation was taken from the Globus Toolkit 6.0 documentation. As a result, there may be inaccuracies and outdated information. Please report any problems to the Grid Community Forums as GitHub issues. |
GCT → Appendices → Grid Community Toolkit 6.0 Developer’s Guide
This page contains links to each GCT 6.0 component’s Public Interfaces Guide.